On Board systems on our UAVs
…enabling SDX1’s mission capabilities
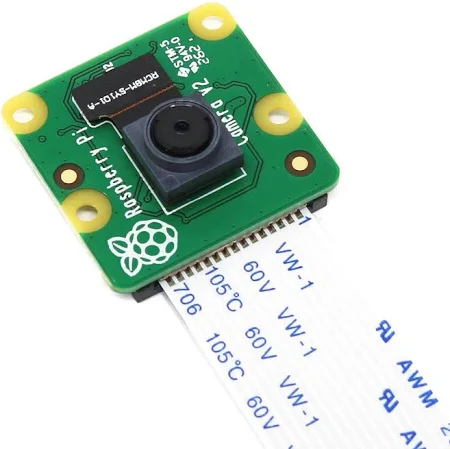
- Communicates with the GPS module for real-time position, velocity, and timing data
- Integrates a 4G/LTE HAT, enabling long-range communication over cellular networks
- Sends telemetry (position, system health, mission status) to the remote server •Receives commands or mission updates from the server
- Relays data to and from the flight controller through serial communication
- Stores mission logs locally for redundancy
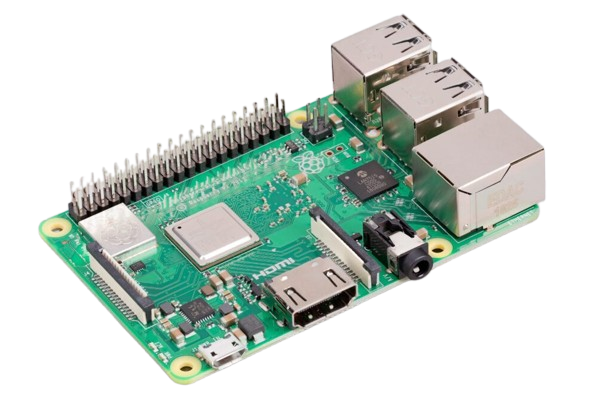
- Runs MAVLink-based firmware compatible with Mission Planner
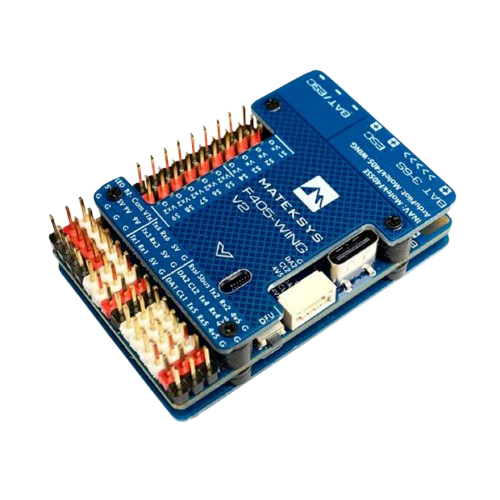
- Processes IMU, barometer, magnetometer, and GPS data to maintain stable flight
- Executes waypoints, automatic takeoff/landing, and return-to-home procedures
- Interfaces with the Raspberry Pi for telemetry and mission updates
- Controls the ESC, servos, and motor output signals
- Monitors flight envelopes and prevents unsafe maneuvers

the SDX1 with 14.4V and 5000mAh
Propulsion System
The propulsion system provides the mechanical thrust required for sustained and reliable flight, enabling the SDX1 to maintain stable airspeed, climb efficiently, descend smoothly, and respond precisely to autopilot commands. It delivers consistent performance under varying conditions, keeping the aircraft controllable and energy-efficient while maintaining seamless communication with the flight controller for accurate throttle response and stable propulsion during complex maneuvers or autonomous operations.
- Brushless DC motor (BLDC) for high efficiency
- Electronic Speed Controller (ESC) that regulates motor power output
- Integration with the flight controller for throttle commands
- Capable of supporting long-endurance cruise flight for fixed-wing missions